Konfigurationen
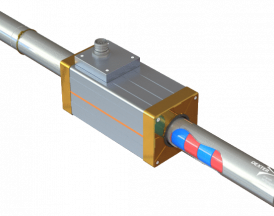
Zylindrisch
• Typischer Weise 3-Phasen-Wicklungen mit bürstenloser Kommutierung mithilfe von Hall- Effekt-Sensoren
• Magnetische Streuung: Mittelhoch
• Ankerpunkte: Nur an beiden Enden
• Längenbegrenzung aufgrund von Biegung
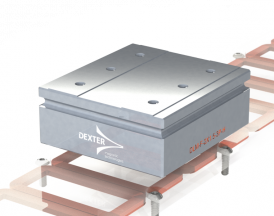
Flach
• Eisenlose Flachmotoren - reibungslose Geschwindigkeitsregelung
• Schlitzlose Flachmotoren - für höhere Kraftabgabe
• Schlitzbügel-Flachmotoren - für noch höhere Kraftabgabe
• Die Rauschkraft kann durch schiefe Magnete verringert werden
Die Anziehungskraft zwischen „Forcer“ und Magnetspur kann vorteilhaft als Vorspannung genutzt werden

U-Kanal
• Zwei einander zugewandte parallele Magnetspuren sitzen in einem U-förmigen Kanal
• „Forcer“ (Spulenwicklungen), die von Lagern zwischen den Magnetspuren getragen werden
• Typischerweise 3-phasige, bürstenlose Kommutierung
• Forcer ist eisenlos; geringe Masse; hohe Beschleunigung; sanfte lineare Bewegung
• Magnetische Streuung: Gering
Kann gestaffelt werden, um die Verfahr Länge zu erhöhen