Configurations
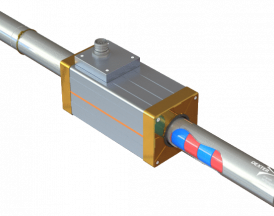
Cylindrique
- Typiquement avec enroulements triphasés, avec commutation sans balais utilisant des capteurs à effet Hall.
- Fuites magnétiques : Moyenne-haute
- Points d'appui : Seulement aux deux extrémités
- Limite de longueur due à la déflexion
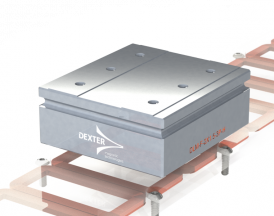
Plat
- Moteurs plats sans fer - contrôle de la vitesse en douceur
- Moteurs plats sans dent - pour une force de sortie plus élevée
- Moteurs plats en fer fendu - pour une force encore plus élevée
- La force d'engrenage peut être réduite par des aimants inclinés.
La force d'attraction entre le "forcer" et la piste magnétique peut être utilisée avantageusement comme précharge.

Canal en U
- Deux pistes magnétiques parallèles se faisant face, logées dans un canal en forme de U.
- Le "forcer" (enroulements de la bobine) est supporté par des roulements entre les pistes magnétiques.
- Généralement triphasé, avec commutation sans balais.
- Le forcer est sans fer ; faible masse ; forte accélération ; mouvement linéaire régulier.
- Fuites magnétiques : Faible
Peut être échelonné pour augmenter la longueur de la course